The Timex/Sinclair 1000 and Sinclair ZX81 played a role in 1980s robotics experimentation and education, offering hobbyists and students an affordable platform for controlling mechanical devices and learning fundamental programming concepts.
A Complete DIY Robot Build

One of the most comprehensive examples of Timex/Sinclair robotics appeared in the July/August 1983 issue of SYNC magazine. Bruce C. Taylor documented his journey building a self-contained, computer-controlled robot called H.E.N.R.Y. using a ZX81. His project demonstrated that serious robotics experimentation was possible on a budget.
Taylor’s robot design was based on a Radio-Electronics magazine reprint series titled “Build this robot for under $400.” The robot featured a cylindrical body approximately 16 inches in diameter with drive wheels placed in the front for traction and maneuverability. The computer and expansion boards were mounted on top and underneath the hinged body.
Technical Implementation
The project highlighted several critical challenges and solutions for using the ZX81 in robotics:
Power Supply Issues: Taylor initially struggled with voltage and frequency spikes from DC motors and controlling relays causing computer malfunctions. He solved this by designing a custom power supply using an LM350 3-amp adjustable voltage regulator with hash filter chokes and a large 2,300 MFD capacitor. This eliminated LOAD and SAVE glitches and protected the computer from electrical interference.
Control System: The heart of the robot control consisted of 5-volt double pole double throw (DPDT) relays driven by the computer output, which in turn activated 12-volt robot motors and solenoids. The system could control up to 20 different functions including:
- Upper body rotation
- Drive wheel control (forward/reverse for each wheel independently)
- Shoulder movements (left and right, up and down)
- Elbow movements
- Hand gripper (open/close)
The relays were double-buffered from the computer output with both transistor switches and small DIP relays, providing robust isolation and protection.
Input System: Taylor installed normally-open contact microswitches as bumper sensors on the robot’s exterior, with spring wire extensions covered in foam rubber pads. These included front, left, and right bumpers. A simple but effective limit switch circuit using diodes and a terminal strip allowed the system to detect when motors reached their limits.
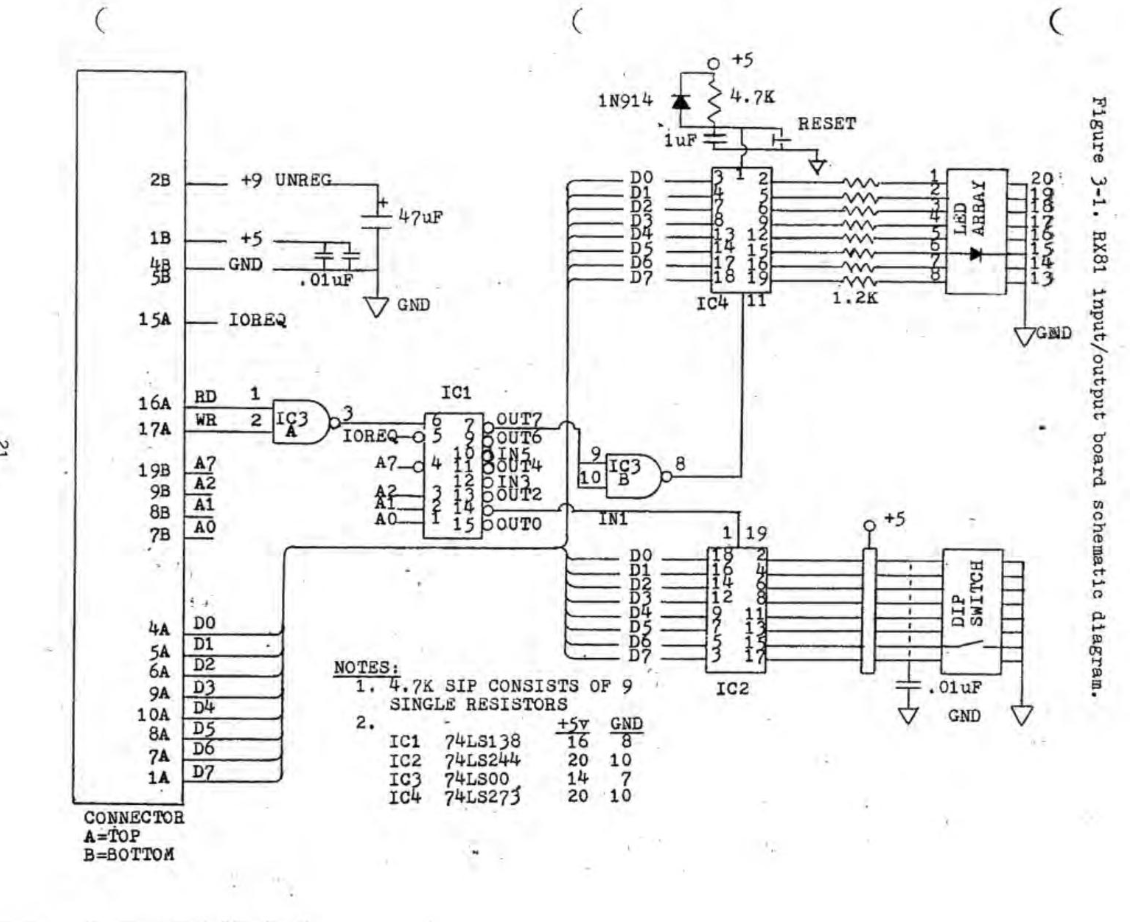
Interface Boards: The project utilized the Computer Continuum expansion board and two Zodex RX-81 input/output boards in bare board form. Taylor built up the boards from components purchased separately to save money while learning about input/output circuitry. He provided detailed wiring tables showing connections from the RX-81 output through transistor switches, DIP relays, and 5-volt relays to the final 12-volt motor/solenoid connections.
Programming Approach
Taylor’s article included complete BASIC programs demonstrating robot control. The software used machine language subroutines accessed via USR commands to activate outputs and read inputs. A typical control sequence involved:
- Setting binary values for the desired output line
- Using POKE commands to activate relays
- Reading input sensors via PEEK commands
- Implementing IF-THEN logic to respond to sensor activation
The main program demonstrated forward movement while scanning for bumper hits. When a front bumper was activated, the robot would stop, back up, turn left about 30 degrees, and continue forward. Left and right bumper hits triggered similar evasive maneuvers, with a random number generator determining turn direction and duration to prevent the robot from getting stuck in corners.
Taylor implemented timing through PAUSE commands and counting loops, noting that the FOR-NEXT loop was effective for input scanning when collision detection was needed.
Memory-Saving Techniques
The article included several programming shortcuts to conserve memory:
- Omitting unnecessary program steps
- Using efficient memory storage for robot movement sequences
- Implementing location tracking so the robot could learn about its movements and environment
Taylor noted that even with a 16K RAM expansion, he hadn’t maxed out the memory, and had a 16K Byte-Back module ready for additional expansion.
Student Science Fair Projects
In April 1985, two Maryland high school students demonstrated the potential of Sinclair computers in robotics at the Prince George’s Area Science Fair. Rick Covell, a senior at Oxon Hill High School, created a radio-controlled robot using a T/S 1000 computer. His project, titled “Robotics via Computer Control,” utilized a robotic manipulator arm under computer command. The system was supported by a thoroughly documented BASIC program that provided general control for the arm, including a ByteBack BB-1 interface that functioned between the Sinclair and the relays driving the stepping motors and lead screws.
Mike O’Neill, a ninth grader at Bowie High School, developed a project called “Computer Control of Outside Devices” using a ZX81. He built a custom interface to control external devices using the port at the back of his Sinclair. The interface could handle up to eight devices on an eight-bit bus, controlling items such as a light bulb, AM radio, beeper, and fan motor. He created his own BASIC program with a menu-type screen that used an attached joystick to select and control the desired external device.
DIY Robot Projects
The hobbyist community also embraced the Sinclair ZX80 and ZX81 for robotics. Articles in SINCLAIR USER magazine from December 1986 and January 1987 detailed plans for building a “tethered robot” suitable for both the ZX80 and ZX81. This project, by Rupert Goodwins, featured a simple platform design with two powered wheels and a caster. The design required two circuit boards: an I/O board that plugged into the computer’s back, and a motor board for switching logic. Instructions were provided for VEROboard construction, and BASIC programs enabled users to control the robot’s movements.
Commercial Robot Products
Several commercial robotics products specifically supported Timex/Sinclair computers during this era:
Smart Rabbit Robot (Hobby Robot Co.) was marketed as “plug compatible with the Timex/Sinclair” series, priced at $329.95. Available in two kit levels, it could be controlled via a TS/1000 computer either mounted on the robot or connected remotely. The Level 2 kit included servo-controlled arms, grippers, and head, with all servomotors proportionally controlled via the computer bus.
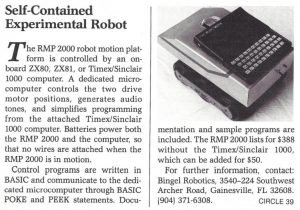
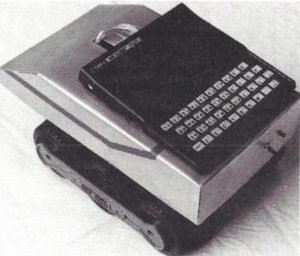
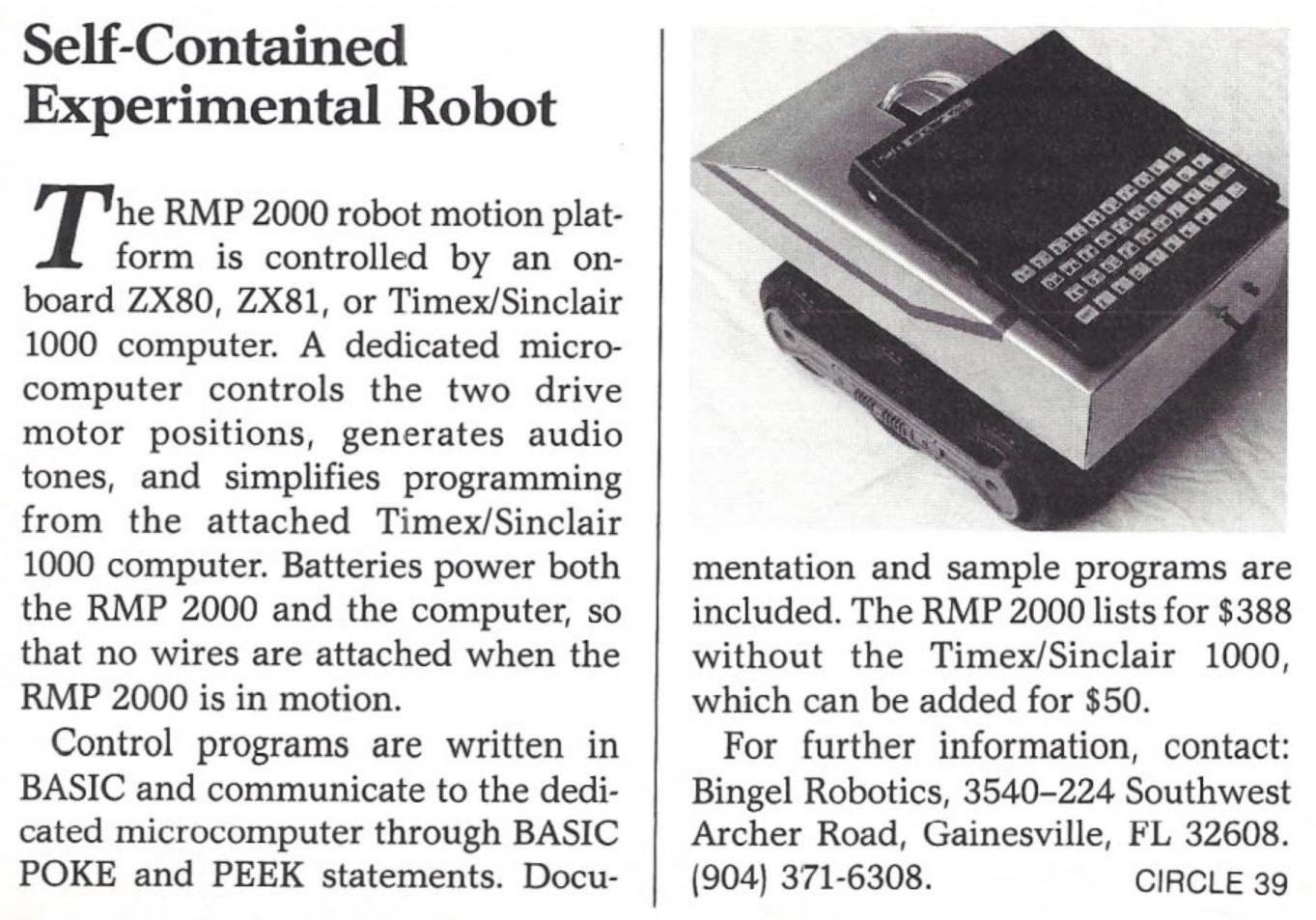
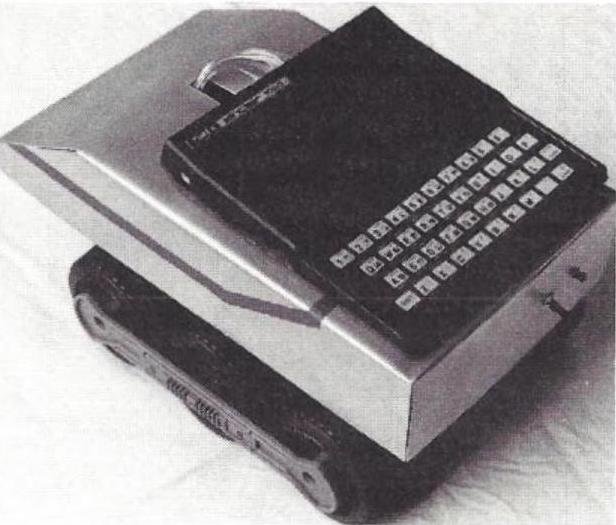
RMP 2000 Robot Motion Platform (Bingel Robotics) was designed specifically for use with the ZX80, ZX81, or T/S 1000. Priced at $388 without the computer ($438 with), it featured an onboard dedicated microcomputer that controlled two drive motor positions and generated audio tones. Users wrote control programs in BASIC that communicated with the dedicated microcomputer through POKE and PEEK statements. The system was entirely battery-powered, allowing untethered operation.
Colne Armdroid I represented a more sophisticated option. This programmable robot arm could be driven by a T/S 1000 and was available either assembled or as a kit. The arm featured six degrees of freedom with a reach envelope of 46.5 cm radius. The system included user-friendly control software on cassette and comprehensive manuals. A July 1984 review in Robotics Age praised its educational value, noting that three children aged six to ten learned to operate it in just a few minutes. The reviewer found the movement repeatability “quite good,” demonstrating tasks like pouring water between cups hundreds of times without spilling.
Educational Applications
The T/S 1000 also appeared in professional educational robotics systems. The Lennox Teaching Robot, a complete training package priced at $2,700, included a T/S 1000 as part of a system designed for teaching robotic application techniques. The package featured a pneumatic pick-and-place manipulator, valve interface, control panel, television receiver, and cassette recorder for program storage.
Why The Timex/Sinclair 1000 for Robotics?
Several factors made the T/S 1000 attractive for robotics applications:
- Affordability: At significantly lower prices than competitors, it provided an accessible entry point for students and hobbyists
- Expandability: The edge connector on the back allowed for custom interfaces and control circuits
- BASIC Programming: The built-in BASIC interpreter enabled users to write control programs without additional software
- Compact Size: The small form factor made it practical to mount on mobile robots
- Low Power Consumption: Battery operation was feasible for untethered robot applications
The T/S 1000 served as a practical tool for exploring robotics concepts during a formative period in personal computing. While limited by modern standards, it provided thousands of enthusiasts with hands-on experience in computer control, interfacing, and programming—skills that laid the foundation for later developments in both personal computing and robotics.
Gallery




Resources
- A Review of the Colne Armdroid I
- Ask R-E: Timex Robot
- Buffered Bus Expansion Board
- Introduction to Computer Control
- Build A Microcomputer Controlled Robot
- Complete Robot Teaching System
- Making an Easy, Inexpensive Robot in the Industrial Arts/Technology Lab
- Motion Platform for ZX81 and TS1000
- Powerful Projects with Your Timex/Sinclair
- RMP 2000
- Robotics on a Budget
- RX81 Robotics Interface
- Science Fair Exhibitors Find Sinclair Computers A Big Help In Furthering Robots and Controls
- Self-Contained Experimental Robot
- Smart Rabbit
- Stepper Motor Interface for Robotics and Machine Control
- X-1 Home Robot Kit
- ZX81 Resources: A Tethered Robot